Custom Search
|
|
 
|
||
|
AC Induction Motors If two stator windings of unequal impedance are spaced 90 electrical degrees apart and connected in parallel to a single-phase source, the field produced will appear to rotate. This is called phase splitting. In a split-phase motor, a starting winding is utilized. This winding has a higher resistance and lower reactance than the main winding (Figure 6). When the same voltage VT is applied to the starting and main windings, the current in the main winding (IM) lags behind the current of the starting winding Is (Figure 6). The angle between the two windings is enough phase difference to provide a rotating magnetic field to produce a starting torque. When the motor reaches 70 to 80% of synchronous speed, a centrifugal switch on the motor shaft opens and disconnects the starting winding. Single-phase motors are used for very small commercial applications such as household appliances and buffers.
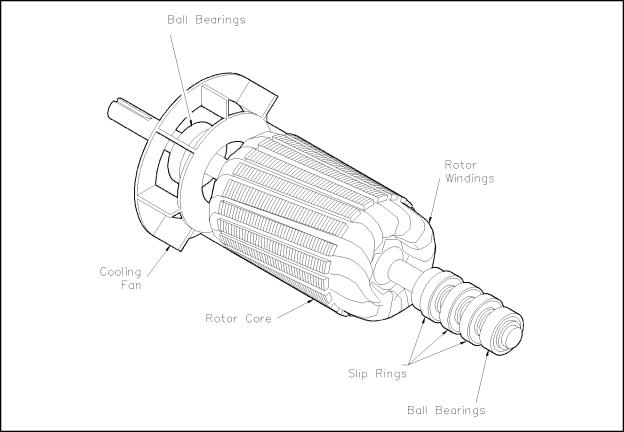
Figure 7 Wound Rotor Synchronous Motors Synchronous motors are like induction motors in that they both have stator windings that produce a rotating magnetic field. Unlike an induction motor, the synchronous motor is excited by an external DC source and, therefore, requires slip rings and brushes to provide current to the rotor. In the synchronous motor, the rotor locks into step with the rotating magnetic field and rotates at synchronous speed. If the synchronous motor is loaded to the point where the rotor is pulled out of step with the rotating magnetic field, no torque is developed, and the motor will stop. A synchronous motor is not a self-starting motor because torque is only developed when running at synchronous speed; therefore, the motor needs some type of device to bring the rotor to synchronous speed. Synchronous motors use a wound rotor. This type of rotor contains coils of wire placed in the rotor slots. Slip rings and brushes are used to supply current to the rotor. (Figure 7). Starting a Synchronous Motor A synchronous motor may be started by a DC motor on a common shaft. When the motor is brought to synchronous speed, AC current is applied to the stator windings. The DC motor now acts as a DC generator and supplies DC field excitation to the rotor of the synchronous motor. The load may now be placed on the synchronous motor. Synchronous motors are more often started by means of a squirrel-cage winding embedded in the face of the rotor poles. The motor is then started as an induction motor and brought to -95% of synchronous speed, at which time direct current is applied, and the motor begins to pull into synchronism. The torque required to pull the motor into synchronism is called the pull-in torque. As we already know, the synchronous motor rotor is locked
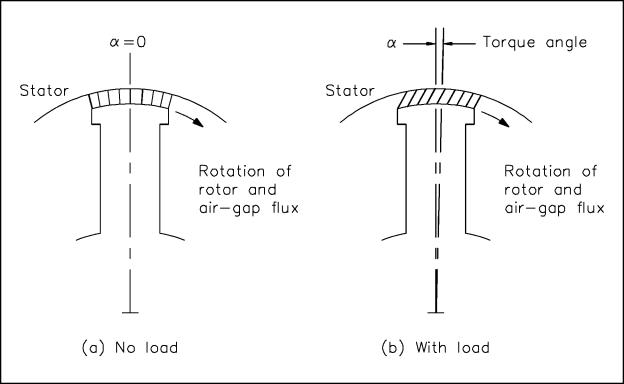
into step with the rotating magnetic field and must continue to operate at
synchronous speed for all loads. During no-load conditions, the center lines of
a pole of the rotating magnetic field and the DC field pole coincide (Figure
8a). As load is applied to the motor, there is a backward shift of the rotor
pole, relative to the stator pole (Figure 8b). There is no change in speed. The
angle between the rotor and stator poles is called the torque angle (
Figure 8 Torque Angle If the mechanical load on the motor is increased to the
point where the rotor is pulled out of synchronism (
|
||
|
||