Custom Search
|
|
 
|
||
|
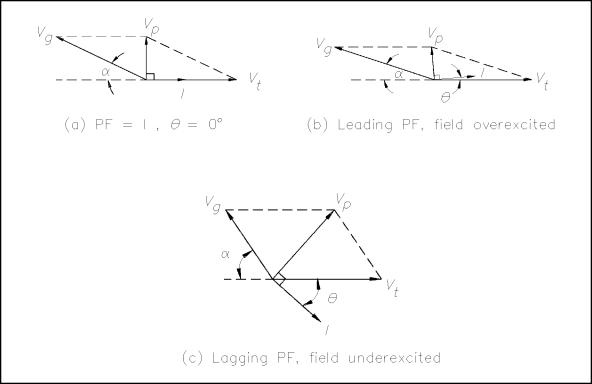
For a constant load, the power factor of a synchronous motor can be varied from a leading value to a lagging value by adjusting the DC field excitation (Figure 9). Field excitation can be adjusted so that PF = 1 (Figure 9a). With a constant load on the motor, when the field excitation is increased, the counter EMF (VG) increases. The result is a change in phase between stator current (I) and terminal voltage (V), so that the motor operates at a leading power factor (Figure 9b). VP in Figure 9 is the voltage drop in the stator winding's due to the impedance of the windings and is 90 out of phase with the stator current. If we reduce field excitation, the motor will operate at a lagging power factor (Figure 9c). Note that torque angle, a, also varies as field excitation is adjusted to change power factor.
Figure 9 Synchronous Motor Field Excitation Synchronous motors are used to accommodate large loads and to improve the power factor of transformers in large industrial complexes. Summary The important information in this chapter is summarized below. AC Motor Types Summary In a split-phase motor, a starting winding is utilized. This winding has a higher resistance and lower reactance than the main winding. When the same voltage (VT) is applied to the starting and main windings, the current in the main winding lags behind the current of the starting winding. The angle between the two windings is enough phase difference to provide a rotating magnetic field to produce a starting torque. A synchronous motor is not a self-starting motor because torque is only developed when running at synchronous speed. A synchronous motor may be started by a DC motor on a common shaft or by a squirrel-cage winding imbedded in the face of the rotor poles. Keeping the same load, when the field excitation is increased on a synchronous motor, the motor operates at a leading power factor. If we reduce field excitation, the motor will operate at a lagging power factor. The induction motor is the most commonly used AC motor in industrial applications because of its simplicity, rugged construction, and relatively low manufacturing costs. Single-phase motors are used for very small commercial applications such as household appliances and buffers. Synchronous motors are used to accommodate large loads and to improve the power factor of transformers in large industrial complexes.
|
 
|
|
|
||